Импульсным источникам питания, в которых используется управление по пиковому току дросселя, требуется пилообразный сигнал для компенсации скорости нарастания (наклона) тока во внутреннем контуре управления. Компенсация наклона обеспечивает устойчивость контура обратной связи по току, в котором без компенсации и при работе в режиме непрерывной проводимости с коэффициентами заполнения, близкими или превышающими 50%, возникали бы субгармонические колебания. Кроме того, контролируемым параметром является среднее значение тока дросселя, которое напрямую связано с током нагрузки, поскольку выходной конденсатор должен иметь нулевой средний ток.

При использовании режима управления по пиковому току (peak current-mode control, PCMC) разность между пиковым и средним значениями тока дросселя является ошибкой, которая должна быть скорректирована. Компенсация наклона исправляет эту ошибку.
Компенсация наклона реализуется путем суммирования периодического пилообразного напряжения с измеряемым сигналом тока. Одним из способов формирования пилообразного напряжения является использование сигнала RC-генератора управляющей микросхемы [1, 2]. Выходной сигнал генератора обычно буферизуется эмиттерным повторителем и подается на резистор, на котором пилообразное напряжение генератора суммируется с измеряемым токовым сигналом, подаваемым на другой резистор. Сумма напряжений поступает на токоизмерительный вход ISNS управляющей микросхемы.
Однако этот метод нагружает генератор и вносит помехи, которые могут приводить к ложным запускам схемы управления широтно-импульсной модуляцией (ШИМ). В указаниях по применению некоторых производителей микросхем управления питанием предписывают не нагружать генератор даже буферным эмиттерным повторителем [3, 4].
Рекомендуемый способ получения пилообразного напряжение – интегрирование сигнала, управляющего затвором MOSFET, с помощью RC-цепи. Выходной сигнал драйвера затвора представляет собой последовательность прямоугольных импульсов с размахом от 0 до 10 В. При правильном выборе номиналов R и C эти импульсы интегрируются, формируя пилообразный сигнал. Когда уровень импульса становится низким, диод разряжает конденсатор, и пилообразное напряжение возвращается практически к нулю.
Этот метод вполне эффективен, но если входное напряжение импульсного источника питания меняется в значительных пределах, возникает проблема. Это приводит к перекомпенсации и фактически увеличивает расхождение между измеряемыми значениями пикового и среднего тока.
Схема на Рисунке 1 формирует пилообразный сигнал, крутизна которого не зависит от входного напряжения. Это делается путем зарядки конденсатора от источника постоянного тока, использующего вывод ШИМ драйвера затвора управляющей микросхемы (вывод 6, OUT) в качестве входа.
 | |
| Рисунок 1. | Добавление к выводу драйвера затвора простого источника постоянного тока для корректора наклона пилы улучшает стабильность и точность импульсного источника питания. |
Предположим, что минимальное входное напряжение импульсного источника питания (вывод 7 микросхемы U1, подключение которого опущено для упрощения) равно 9 В. При высоком уровне импульса, составляющем порядка 7.5 – 8.0 В, цепочка R1-Q1-Q2-R2 образует источник постоянного тока, заряжающий конденсатор C1. При R1 = 220 Ом (и напряжении база-эмиттер 0.65 В) ток равен примерно 2.95 мА. В течение времени t этот постоянный ток будет заряжать конденсатор C1 до напряжения, определяемого следующими формулами:

или
и наклон пилы будет равен
Таким образом, для рассматриваемого примера схемы наклон равен
Для периода переключения 3.0 мкс (333 кГц) и коэффициента заполнения, равного 2/3, время активного состояния импульсов ШИМ равно 2.0 мкс. Поэтому пиковый уровень компенсирующего пилообразного сигнала равен 3.94 В.
В паузах между импульсами диод D1 открывается и разряжает конденсатор C1 до напряжения, близкого к нулю. Номиналы R1 и C1 следует выбирать такими, чтобы пиковое напряжение пилообразного сигнала оставалось меньше минимального входного напряжения, которое в данном случае составляет 9.0 В. Кроме того, номиналы R3 и C1 должны быть выбраны так, чтобы R3 не нагружал конденсатор C1.
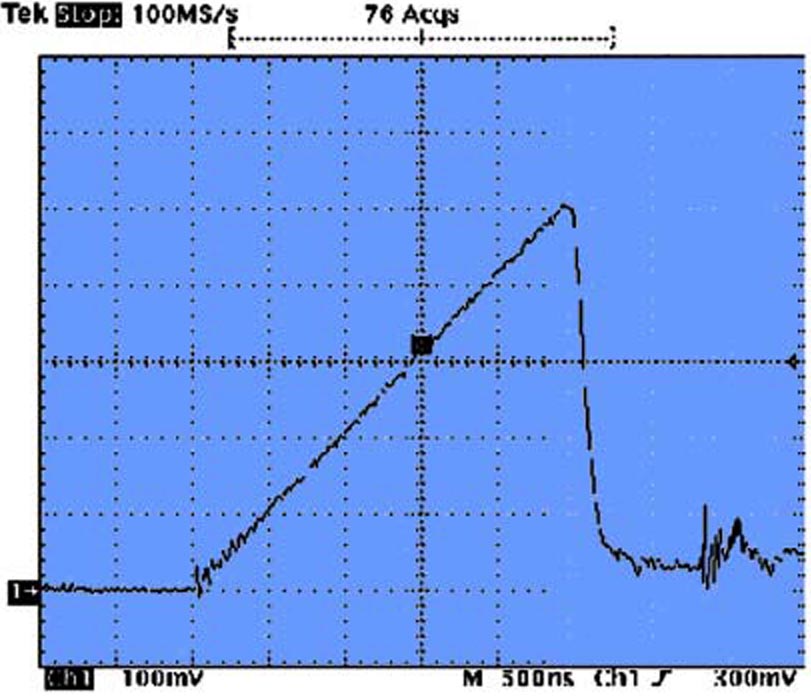 | |
| Рисунок 2. | Измерение пилообразного сигнала, формируемого схемой на Рисунке 1, показывает, что изменение входного напряжения от 9 до 16 В не влияет на форму и амплитуду сигнала. |
При максимальном входном напряжении 16.0 В наклон пилы по-прежнему составляет 1.97 В/мкс, что было бы невозможно при использовании RC-цепочки. Пилообразный сигнал подается на резистор R3, а нефильтрованный измеренный сигнал ISNS_UNFLTRD – на резистор R4. Сумма этих двух сигналов поступает на токоизмерительный вход ISNS (вывод 3) управляющей микросхемы. Форма и амплитуда сигнала, показанного на Рисунке 2, не меняются при изменении входного напряжения от 9 до 16 В.