Особенности применения ультразвукового дальномера HC-SR04 в качестве средства ориентации мобильного объекта
Басков М.П., Левашов О.Д.
Москва – Брешия (Италия)
Для проверки алгоритма избегания препятствий мобильным объектом в условиях помещения с произвольной планировкой нами использовалась мобильная платформа на гусеничном ходу с размерами 200 × 100 мм. В качестве управляющего контроллера использовался микроконтроллер «Искра JS” на базе чипа STM32F405RG. Язык высокого уровня JavaScript позволяет проводить отладку в ходе исполнения программы, загруженной в память микроконтроллера.

В качестве средства получения информации об окружающей среде нами был выбран недорогой и достаточно точный ультразвуковой датчик HC-SR04. Датчик установлен на вращающейся платформе, обеспечивающей сканирование передней полусферы с шагом 15 градусов. Перед установкой в макет датчик был проверен на точность измерения расстояния с применением лазерной рулетки, и показал точность 1-3 см в диапазоне от 3 до 250 см.
Экспериментальная проверка дала отрицательный результат. Объект терся о стены, врезался в углы мебели, и его поведение, несмотря на алгоритм, прошедший испытание в компьютерной модели, никак нельзя было назвать разумным. Причина такого поведения объекта заключалась в полной неспособности датчика измерять расстояние при движении к препятствию под углом. Для того чтобы предупредить возможные ошибки коллег, мы провели показательные испытания ультразвукового датчика в типовых ситуациях.
 | ||
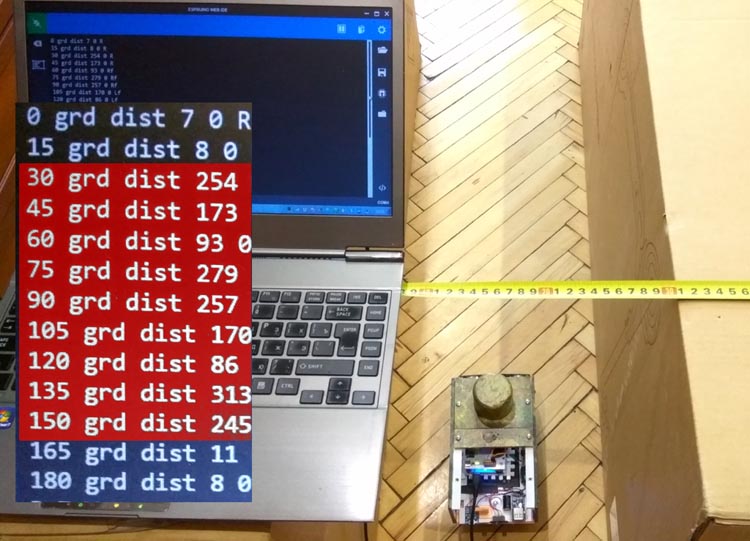
| Рисунок 1. | Типовая ситуация приближения мобильного объекта к препятствию под острым углом. | |
 | ||
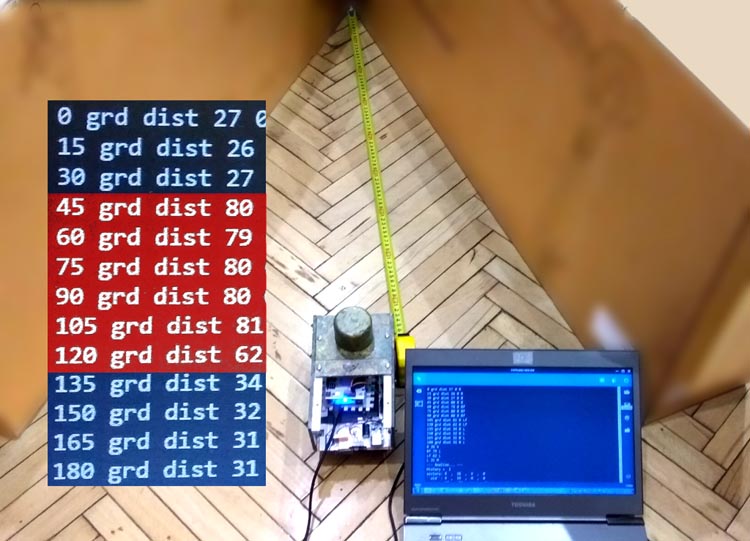
| Рисунок 2. | Типовая ситуация движения объекта в узком коридоре. Расстояние между стенами 30 см. | |
На ситуационных фотографиях (Рисунки 1-5) представлены различные положения объекта и препятствий, а также приведены данные сканирования. При анализе данных необходимо учитывать, что измеренное расстояние отсчитывается от края платформы объекта, а не от фронтальной плоскости датчика. Красным фоном выделены ошибочные результаты измерения расстояния до препятствия. Сканирование производится справа налево, т.е. крайнее правое положение датчика соответствует 0 градусов, а крайнее левое – 180 градусам.
 | ||
| Рисунок 3. | Типовая ситуация движения объекта в коридоре шириной 1 м. | |
 | ||
| Рисунок 4. | Нестандартная ситуация движения объекта к вершине острого угла, образованного стенами помещения. | |
Причина такого поведения датчика объясняется, на наш взгляд, достаточно просто. При измерении расстояния до препятствия, плоскость которого находится под прямым углом к оси измерения, проекция пучка ультразвуковых колебаний условно является кругом. При измерении под углом к плоскости препятствия круг вырождается в эллипс. Разное время прихода отраженного сигнала от ближнего и дальнего концов этого эллипса является основной причиной ошибок измерений. К тому же значительная часть энергии излучения бесполезно отражается в пространство, что также не способствует точности измерений. Мы должны были подумать об этом заранее, но поскольку все наше внимание было сосредоточено на алгоритме, упустили этот феномен из виду.
 | ||
| Рисунок 5. | Стандартная ситуация. Движение объекта к углу препятствия. | |
 | ||
| Рисунок 6. | Переходный процесс, возникающий в механизме перемещения УЗ-датчика после изменения положения. | |
Еще одно важное практическое наблюдение, относящееся к процессу сканирования. Механическая система, состоящая из ротора серводвигателя, редуктора, платформы датчика, самого датчика и декоративной крышки имеет в нашем случае время затухания собственных колебаний 240 мс. Характер переходного процесса показан на Рисунке 6. Поэтому между командой поворота серводвигателя и измерением расстояния необходим таймаут, величина которого зависит от конкретной конструкции сканера.
ООО «Мегател», ИНН 3666086782, ОГРН 1033600037020
Добавить свое объявление
* заполните обязательные данные
Статистика eFaster:
позиций 25 067 862